 |
| Figure 1. Lazy eggs don't stand up. |
It may surprise you but the simple answer is actually in your fridge! An uncooked egg’s density is pretty constant throughout its shape. There are small differences between the shell, albumen and yolk but they are unimportant and it is obvious to see that eggs don’t stand to attention [1]. The eggs actually have an infinite number of equilibrium points because they can be rolled over to any point on their side and they won’t move.
So a uniform egg shape won’t stand up, but will any shape? Mathematically, what we are looking for is a shape that has exactly one stable equilibrium point and one unstable equilibrium point.
Before we consider the 3D case, let us remove a dimension and consider flat 2D shapes. For two-dimensional convex shapes it can be proven that:
all planar, convex, homogenous shapes have at least 2 stable and 2 unstable equilibria.
A sketch of the proof can be found below. Hence, we know that if a weeble of uniform density exists then it cannot be effectively two-dimensional. What we can observe is that the 2D oval has two stable equilibria and for any number greater or equal to three the regular polygon with “n” sides will have “n” stable equilibria.


But what about three dimensions? Sadly, things are not so simple. However, when logical proofs are not forthcoming mathematicians are just as open to experimentation as any other scientist.
Below are a number 3D shapes, have a go at counting the number of stable equilibria they have. The answers can be found if you scroll down past the theorem proof.
   |
| Figure 2. A cube, a square based pyramid and a cylinder with edges sliced at an angle. |
Now that you have got a feel for finding stable equilibria, have a think about what kind of shape would have one stable equilibrium point and one unstable only. Are you sure it even exists? Before we answer this question we take a detour next week and show how we can make our eggs not so lazy!
________________________________________________________________
________________________________________
[1] It is possible to get your eggs to stand up right if you hard boil them and give them a spin. http://charlottemasonway.blogspot.co.uk/2012/09/weekly-wrap-up-week-4.html
________________________________________________________________
________________________________________
Proof of theorem 1


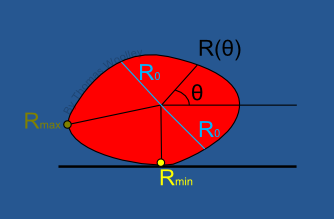
Consider a 2D convex object that has only one stable and one unstable equilibrium point. Define a function, R(ɵ), that is the distance of the perimeter away from the centre of gravity as shown in the figure on the left. The function depends on the angle ɵ (measured in radians) around the centre of gravity and so as ɵ increases from 0 to 2π the function, R, will do one revolution of the shape.

Consider a 2D convex object that has only one stable and one unstable equilibrium point. Define a function, R(ɵ), that is the distance of the perimeter away from the centre of gravity as shown in the figure on the left. The function depends on the angle ɵ (measured in radians) around the centre of gravity and so as ɵ increases from 0 to 2π the function, R, will do one revolution of the shape.
Now consider the graph of R. By assumption there are only two equilibria, one stable and one unstable, thus, the corresponding graph has just one maximum and one minimum, as shown in the figure on the right. This is how the equilibria where defined last week.
Suppose we now drop a horizontal line across the graph. In particular let the points at which the horizontal line touches the graph be separated by an angular distance of π radians. This will correspond to a straight cut through the shape. Call this corresponding value R0.
By definition everything above this horizontal would be the part of the shape that is further than R0 away from the centre of gravity and everything below would the part of the shape closer than R0 to the centre of gravity. This means that one half of the shape would be bigger than the other half, and, thus, heavier. But by definition the cut goes through the centre of gravity and so each side weighs the same. As we come to a contradiction, our original hypothesis (that such a shape exists) must be wrong.
________________________________________________________________
________________________________________
Answers
 |
| The cube has 6 stable equilibria; one on each of the flat faces, as shown. |
 |
| The cube has 5 stable equilibria; one on each of the flat faces, as shown. |
 |
| The sliced cylinder only has 1 stable equilibrium. However, it is not a shape that satisfies our need because it has 3 unstable equilibria; one on the top of the cylinder and one at each of the tips. |



